A XMobots desenvolveu um sistema de mapeamento especial para uso em cultivos agrícolas em áreas esparsas. A tecnologia deve ser utilizada especialmente no cultivo de cana-de-açúcar, em que é comum ocorrer em áreas não contínuas, por meio de talhões.
Para permitir o funcionamento do mapeamento, a XMobots aplicou no XPlanner (software de plano de voo) a função multipolígono. Com ela, o usuário pode mapear, em um único voo, um número variado de polígonos em um raio de 5Km aprovado pela Agência Nacional de Aviação Civil (Anac).
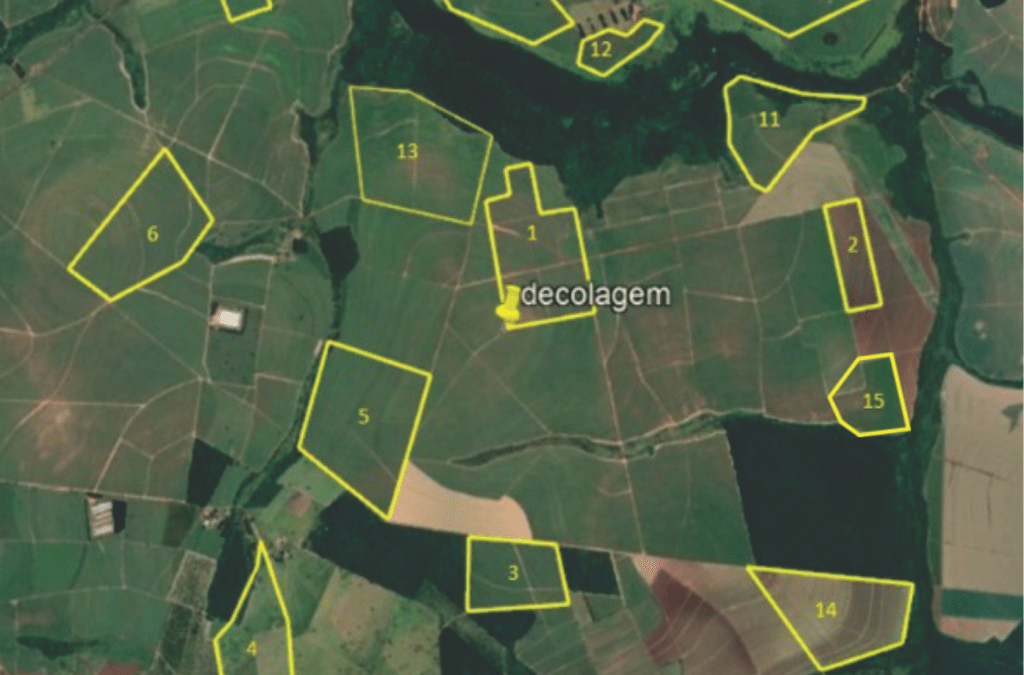
Em um teste recente feito pela XMobots, comparando o desempenho do Arator 5B HAL BVLOS com o drone multirotor RTK, foi simulado um dia de trabalho de um piloto de uma usina de cana-de-açúcar. A meta dada para os operadores dos dois equipamentos foi mapear uma área de 800 hectares, distribuídos em 15 talhões, dispostos entre si em um raio de 5 quilômetros.
Por se tratar de uma aplicação de agricultura de precisão, os voos ocorreram das 9h às 15h, período em que a janela de luminosidade garante os melhores resultados no imageamento. Neste intervalo houve uma pausa de 1 hora para almoço.
O Arator levou nítida vantagem. Segue abaixo a compilação dos resultados:
RESUMO DA OPERAÇÃO DO ARATOR:
Área mapeada: 797,10 hectares
Polígonos mapeados: 15
Tempo de operação: 5h
Número de voos: 4
Número de baterias: 4
Tempo total de troca de baterias (para 15 polígonos): 21min 25 seg
Tempo total gasto de deslocamento entre polígonos (para 15 polígonos): 0min0seg
RESUMO DA OPERAÇÃO DO MULTIROTOR
Área mapeada: 173,5 hectares
Polígonos mapeados: 4
Tempo de operação: 5h
Número de voos: 10
Número de baterias: 10
Tempo total de troca de baterias (para 4 polígonos): 21min 25 seg
Tempo total gasto de deslocamento entre polígonos (para 4 polígonos): 16min 37seg


